
All Work
Foresight
Tech
Concept Testing
Qualitative Research
Understanding what makes humans comfortable collaborating with a robot — and mapping the journey to trust.
The purpose of this study was to understand the reception of a proposed robot design concept by potential users — specifically in regards to their comfort and ability to interact with it.
Through the use of three experience storyboards, I identified major pain points users may experience while interacting with the robot, and how these pain points might contribute to negative feelings, vandalism, avoidance, and irritation.
To evaluate thoughts and feelings of potential users and determine whether the robot design is pleasant and enjoyable to interact with, I employed concept testing techniques across 16 in-depth interviews.
A rigorous recruitment process ensured a representative mix of office and factory workers, across age, gender, cultural background, and attitude towards technology.
Participants watched video storyboards of Alex — the robot — in real workplace situations, then responded to a structured set of questions about comfort, usefulness, and willingness to engage.
Alex escorts a colleague through the building. En route, the room capacity is reached and Alex suggests an alternative space — demonstrating proactive, purposeful communication through visual and audio cues.
01Alex requests a technician's help in changing a forklift light, assists with the task, notes the technician's new skill in its database, and rewards them for their contribution — testing comfort with reciprocal robot relationships.
02Two contrasting conversations with Alex — one casual and warm, one more formal and task-oriented — exploring how participants respond to different relationship registers and whether personality consistency matters.
03"I'd be really comfortable with that because that's the way I learn — hands on. If you show me how to do it, I can do it. And then it had the whole video right there on the screen. That was cool."
"If it asked me to do something I've never done before or super complicated, I would probably refuse. But if it was something easy — like tighten bolts — I would be okay if it can show me how."
Participants were asked to describe Alex's personality and name characters they associated with the robot's look, movement, voice, and demeanour.
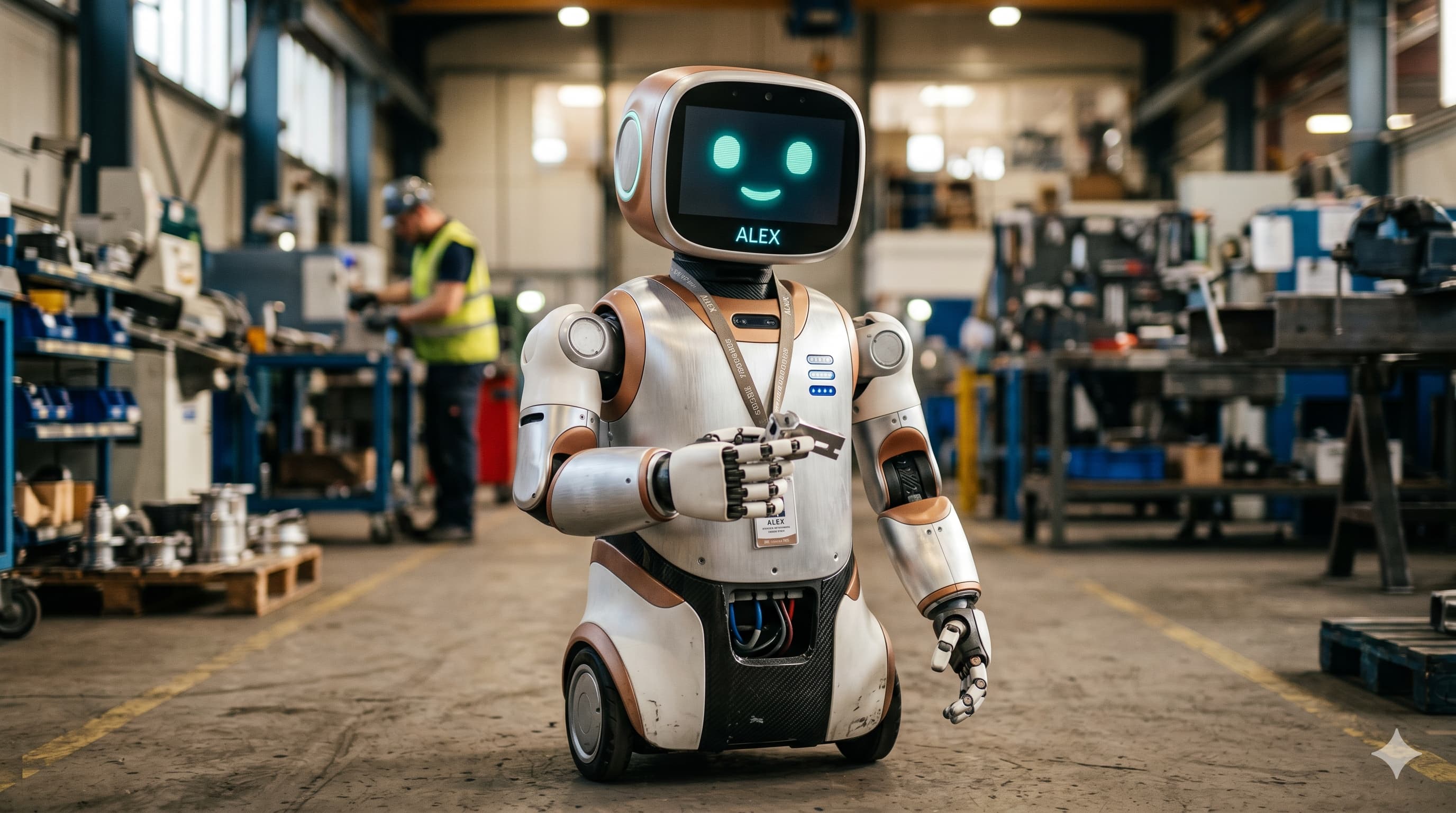
These are the characters participants most often associated with Alex — a telling window into how the robot's design registered emotionally.
Research surfaced a clear four-stage model describing how employees move from first awareness of the robot to daily confident interaction — each stage requiring specific trust-building interventions.
Participants clustered into three distinct attitudinal groups — each requiring a tailored engagement approach, yet unified by one non-negotiable: control over personal data.
See Alex as a friendly colleague and are open to a collaborative relationship. They embrace the scenario of Alex knowing their skills — "so it knows whether it can approach me" — and enjoy hands-on learning facilitated by the robot. Relationship-building should mimic human-to-human interaction, and happen gradually.
Comfortable with Alex in principle but want clear limits. They want to be able to refuse without consequences — no reporting to supervisors, no negative impact on standing. They value usefulness above warmth, and need to trust that Alex is a tool, not a manager.
Strictly professional. Found Scenario 2 creepy, intrusive, and uncomfortable — feeling Alex was behaving like a manager. They do not want Alex to hold private information, insisting it should only know what is formally distributed. Their trust must be earned slowly through consistency and transparency.
Universal finding across all three groups: Every participant, regardless of attitude, wanted to be in full control of their personal data. This non-negotiable must be communicated clearly to all employees before Alex enters the facility.